ios
web安全
程序人生
多线程
最优假彩色合成
dirs
easyui
python爬虫
多继承和菱形虚拟继承
系统架构
新媒体运营
指针空值nullptr
PIXIjs
跨境电商
日期类的实现
几何
C++11
Scratch等级考试真题
社交媒体
php送水平台
bev
2024/4/12 12:49:58
基于激光雷达点云(lidar)的目标检测方法之BEV
基于激光雷达点云(lidar)的目标检测方法之BEV 附赠自动驾驶学习资料和量产经验:链接
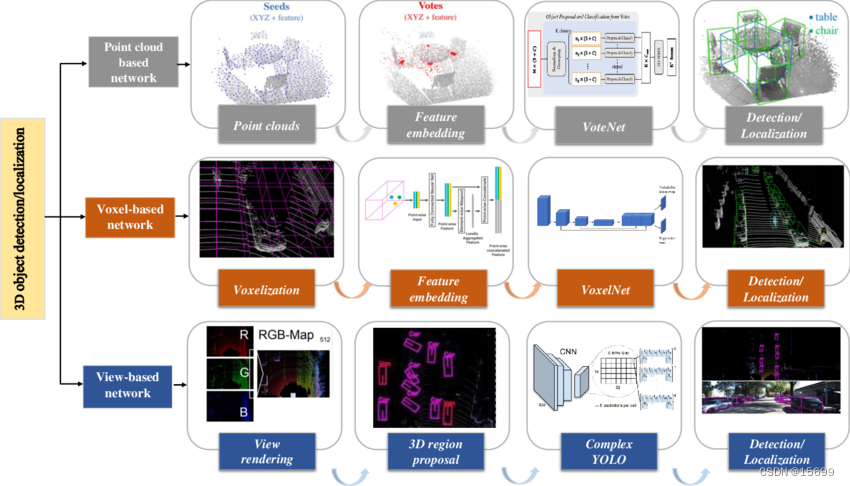
基于lidar的目标检测方法可以分成3个部分:lidar representation,network backbone,detection head,如下图所…

BEV(Bird‘s Eye View)
文章目录BEV(Birds Eye View,鸟瞰视图)1. BEV网络基本概念2. BEV网络应用3. BEV网络应用详解4.优化BEV网络优化BEV网络 详解BEV网络,怎么优化去减小计算量,用在嵌入式平台的机器人导航上5.学习与实践BEV网络6. 哪些产品…
1.2 BEV感知算法数据形式
本文来自自动驾驶之心知识星球的国内首个BEV感知全栈系列学习教程 Birds-eye-view (BEV) Perception: A Survey and Collection 什么是图像 1. 图像是由相机生成的,是将三维世界 中的坐标点(单位为米)映射到二维 图像平面(单位像…
基于BEV的自动驾驶会颠覆现有的自动驾驶架构吗
基于BEV的自动驾驶会颠覆现有的自动驾驶架构吗 引言
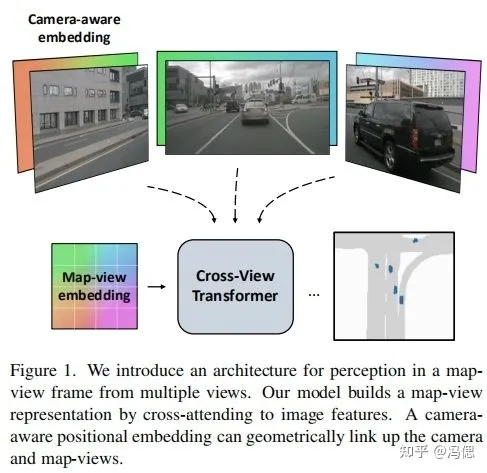
很多人都有这样的疑问–基于BEV(Birds Eye View)的自动驾驶方案是什么?这个问题,目前学术界还没有统一的定义,但从我的开发经验上,尝试做一个解释:以鸟瞰视角为基础…

自动驾驶感知新范式——BEV感知经典论文总结和对比(一)
自动驾驶感知新范式——BEV感知经典论文总结和对比(一)
博主之前的博客大多围绕自动驾驶视觉感知中的视觉深度估计(depth estimation)展开,包括单目针孔、单目鱼眼、环视针孔、环视鱼眼等,目标是只依赖于视…

谈一谈BEV和Transformer在自动驾驶中的应用
谈一谈BEV和Transformer在自动驾驶中的应用
BEV和Transformer都这么火,这次就聊一聊。 结尾有资料连接
一 BEV有什么用
首先,鸟瞰图并不能带来新的功能,对规控也没有什么额外的好处。
从鸟瞰图这个名词就可以看出来,本来摄像头…
模型部署 - BevFusion - (1) - 思路总结
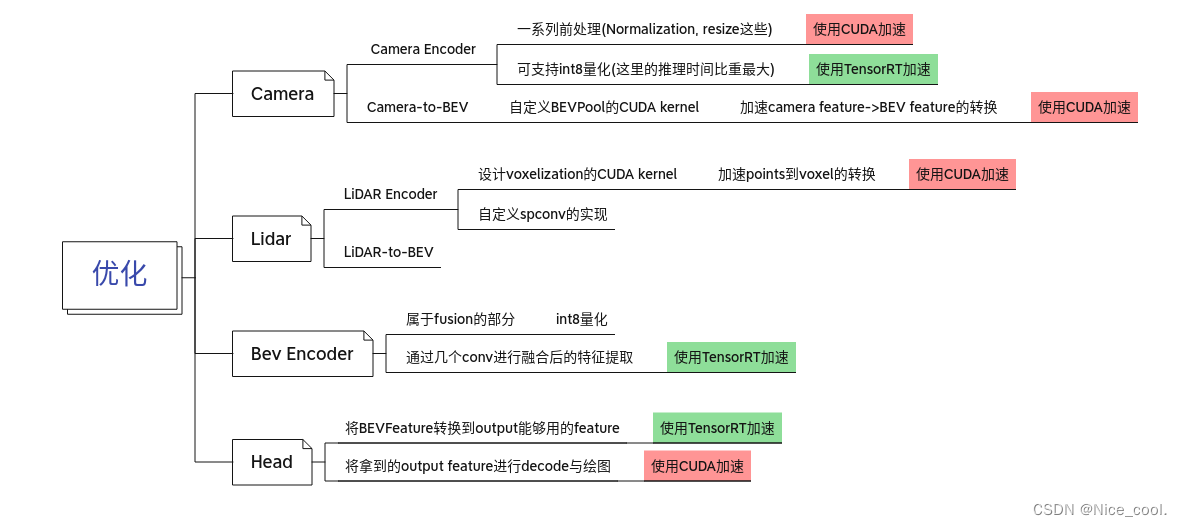
模型部署实践 - BevFusion 思路总结一、网络结构 - 总结1.1、代码1.2、网络流程图1.3、模块大致梳理 二、Onnx 的导出 -总体思路分析三、优化思路总结 学习 BevFusion 的部署,看了很多的资料,这篇博客进行总结和记录自己的实践
思路总结
对于一个模型我…

【点云鸟瞰图BEV】点云鸟瞰图BEV原理与可视化
本节将介绍激光雷达等点云的鸟瞰图生成原理、代码及效果图。
1 BEV视图原理 点云BEV(Birds Eye View)视图是指点云在垂直于高度方向的平面上的投影。通常,在获得bev视图前,会将空间分割成体素,利用体素对点云进行下采…
解决长尾问题,BEV-CLIP:自动驾驶中复杂场景的多模态BEV检索方法
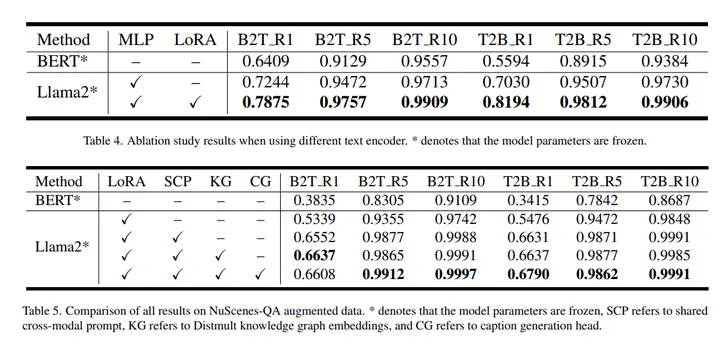
解决长尾问题,BEV-CLIP:自动驾驶中复杂场景的多模态BEV检索方法 理想汽车的工作,原文,BEV-CLIP: Multi-modal BEV Retrieval Methodology for Complex Scene in Autonomous Driving
链接:https://arxiv.org/pdf/2401.…
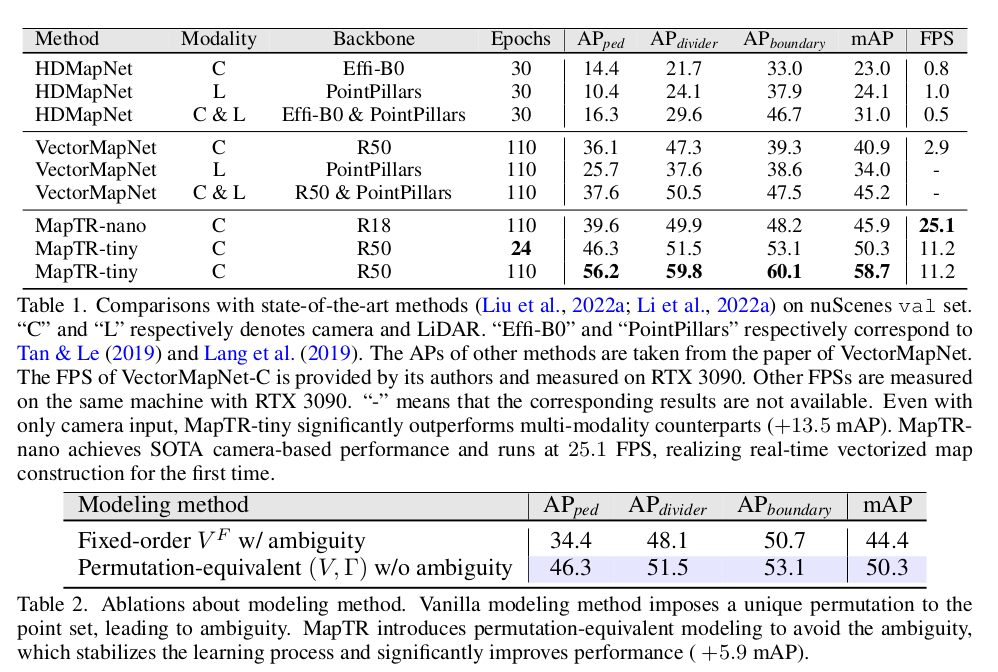
MapTR 论文研读
MapTR 论文研读
MapTR论文 :https://arxiv.org/pdf/2208.14437.pdf
代码:https://github.com/hustvl/MapTR
MapTR(来自地平线)
1.摘要
作者们提出了一种有效构建高清地图的方法(MapTR),该地图为自动驾驶系统的规划提供丰富且精确的环境信息。这是一种结构化端到端变…
![[BEV系列]BEVFormer: Learning Bird’s-Eye-ViewRepresentation from Multi-Camera Images viaSpatiotemporal](https://img-blog.csdnimg.cn/27da0a0c762c4279ba124084b06e0ec9.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5YeM6Z2S5769,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
[BEV系列]BEVFormer: Learning Bird’s-Eye-ViewRepresentation from Multi-Camera Images viaSpatiotemporal
论文链接:https://arxiv.org/pdf/2203.17270v1.pdf 代码链接:https://github.com/zhiqi-li/BEVFormer 1. 摘要(Abstract) 3D视觉感知任务,包括基于多摄像头图像的3D检测和地图分割,对于自动驾驶系统至关重要…
BevFusion-NerIPS-2023记录1:nusences数据集
mmdetection3d在执行下列语句初始化nusences数据集时需要有nuscenes完整目录,现记录:
nuscenes完整目录
data/nuscenes/
├── maps ## 包含nusences数据集中train/test部分├── 36092f0b03a857c6a3403e25b4b7aab3.png├── 37819e65e09e5547b8a3c…